Projects
A selection of robotics and coding work.
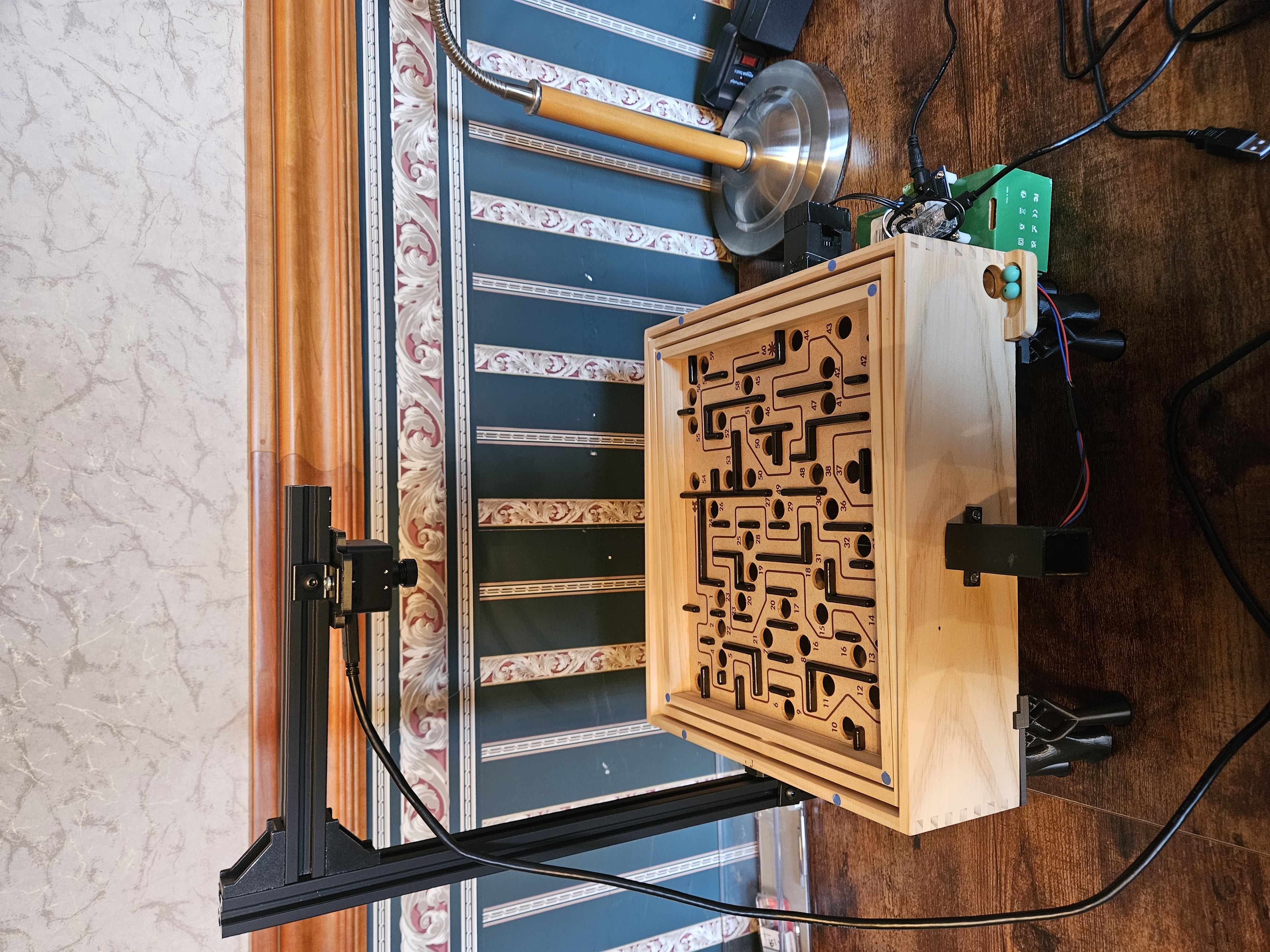
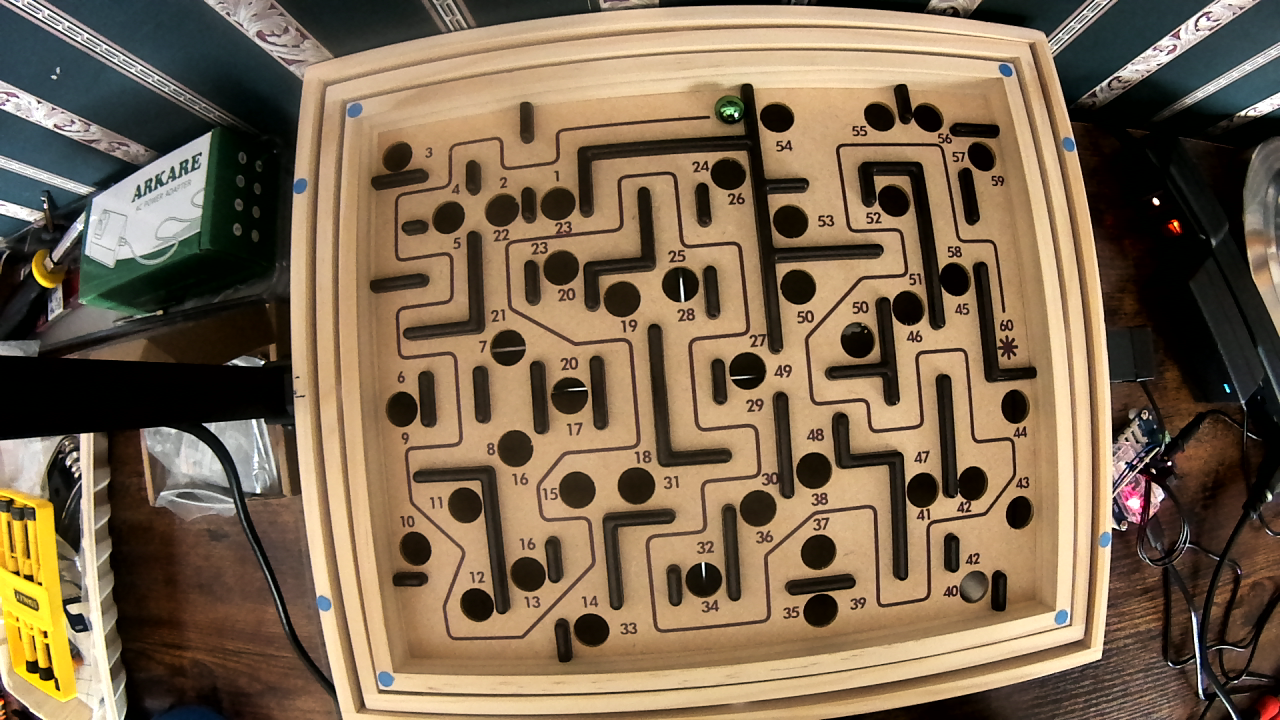
CyberRunner is based off the work of Thomas Bi and Raffaello D'Andrea at ETH Zürich. CyberRunner is an autonomous robot that uses reinforcement learning to guide a ball through the labyrinth board game. The ball must be manuevered around walls, while avoiding holes. Cyberrunner is a vision-based system that uses real time state estimation. You can learn more at cyberrunner.ai.
This robot was built for the Robot maze event at the National Robotics Competition (NRC) in Marion, OH.
MazeBot was built from this kit.
MazeBot's mecanum wheels allow it to strafe horizontally. With the front-mounted sonar, it can detect an opening in the wall while strafing, and then advance to the next programmed move. The movement sequence is hard-coded, unlike earlier versions that relied primarily on camera and sonar feedback. Reliable localization was a challene, mainly because of the slipping of the wheels. On solution was to deliberately overshoots openings and presses against walls to "reset" its position (hence the program is named dumbdumb.py).

Under construction